 It
It En
En










Categorie prodotti

Encoder rotativi incrementaliLinee di encoder rotativi incrementali ad albero sporgente, cieco e passante

Encoder rotativi assolutiLinee di encoder rotativi assoluti mono e multigiro Eltra

Trasduttori LineariLinee Eltra di encoder lineari, potenziometri e magnetostrittivi

Altri prodotti

Accessori
Applicazioni
{kind=link}
Tecnologia medicale
Linee di massima accuratezza e precisione per garantire un controllo ottimale delle ultime tecnologie in ambito medico-scientifico.

{kind=link}
Motion control
Soluzioni con elevato grado IP, estremamente versatili e semplici da assemblare, particolarmente adatte al controllo di movimento.

{kind=link}
Motori sincroni/asincroni
Gamme di encoder ottici e magnetici, resistenti ad un ampio spettro di temperature e ad alte velocità di rotazione.

{kind=link}
Industria tessile
Soluzioni particolarmente solide e resistenti a vibrazioni e polveri, che garantiscono al tempo stesso velocità e risoluzione elevate.

{kind=link}
Metalli
Gamme di encoder assoluti ed incrementali ad alta resistenza meccanica, idonei per il processo di metalli ad alte temperature.
{kind=link}
Industria alimentare
Gamme di encoder in acciaio INOX, con alto grado di protezione IP per proteggere il dispositivo da prodotti chimici e liquidi e garantirne la massima affidabilità.

{kind=link}
Energia eolica
Soluzioni resistenti ad un ampio range di temperature e a condizioni estreme per l’ottimizzazione dei sistemi Pitch e Yaw nei generatori eolici.

{kind=link}
Macchine agricole
Gamme ad alta precisione e semplici da montare, studiate per la rilevazione di misure lineari di lunghe distanze.

{kind=link}
Ascensori
Linee di encoder rotativi incrementali ad elevata risoluzione e precisione studiati per garantire la massima affidabilità e sicurezza.

{kind=link}
Event technology
Gamme di encoder rotativi e lineari progettati per macchine per fitness, strutture automatizzate di teatri e giostre meccaniche.

{kind=link}
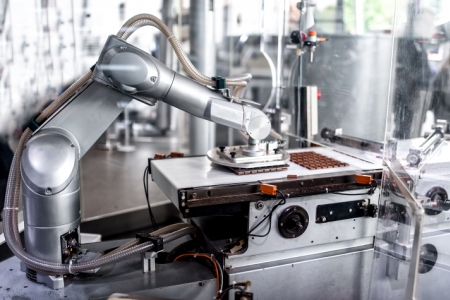
Robotica
Encoder ad alta risoluzione ed elevata frequenza operativa per assicurare la massima precisione di sistemi automatizzati e robot industriali.

{kind=link}
Motori brushless
Dispositivi compatti con fasi a effetto Hall, ad alta resistenza meccanica, con un’ampia scelta di risoluzioni e di interfacce elettroniche.

{kind=link}
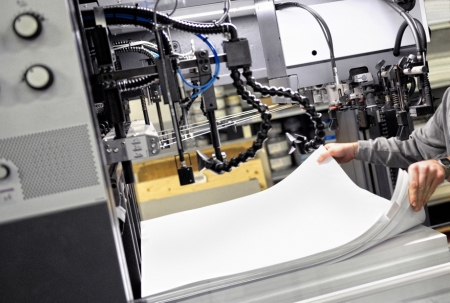
Carta e stampa
Gamme di encoder ad elevato grado di protezione IP, resistenti ad acqua, umidità prodotte nella lavorazione della polpa.

{kind=link}
Pietra e marmo
Soluzioni robuste ad alta risoluzione e precisione, progettati per la lavorazione di marmi, graniti e pietre.

{kind=link}
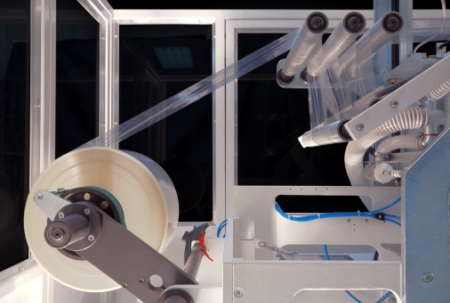
Etichettatrici
Modelli di encoder ad alta velocità e frequenza operativa per un controllo preciso ed efficiente di velocità e posizione.

{kind=link}
Energia solare
Linee di encoder magnetici estremamente robusti, studiati per controllare con precisione la posizione di Tilt e Azimuth negli inseguitori solari.

{kind=link}
Macchine escavatrici
Soluzioni in acciaio INOX ad elevato grado IP, per garantire la massima resistenza del dispositivo in ambienti corrosivi e gravosi.

{kind=link}
Sollevamento merci
Soluzioni adatte ad ambienti gravosi, estremamente robuste e resistenti alle vibrazioni provocate nel sollevamento di merci e materiali pesanti.

{kind=link}
Argani e trivelle
Modelli robusti e resistenti, con certificazione ATEX, disponibili con diverse opzioni di interfaccia elettronica per un controllo preciso e sicuro di argani e trivelle.

{kind=link}
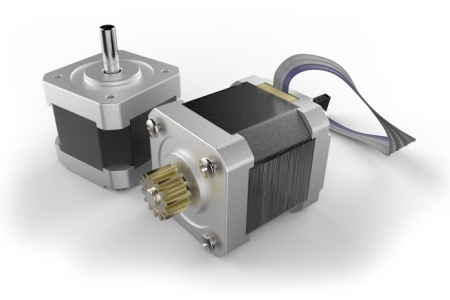
Motori passo-passo
Soluzioni di piccole dimensioni, facili da montare, studiate per essere altamente versatili e garantire la massima affidabilità.

{kind=link}
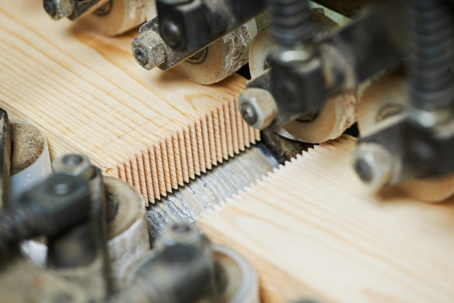
Lavorazione del legno
Dispositivi con ottima risoluzione e velocità operativa elevata, adatti all'applicazione su macchine da frese, presse e CNC (controllo numerico).

{kind=link}
Vetro e ceramica
Dispositivi ad elevato grado IP, resistenti a liquidi e ad un ampio spettro di temperature, adatti alla lavorazione della ceramica e del vetro.

{kind=link}
AGV (Automated Guided Vehicle)
Trasduttori rotativi e lineari a tecnologia magnetica, particolarmente compatti e ad elevato grado di protezione IP.
{kind=link}
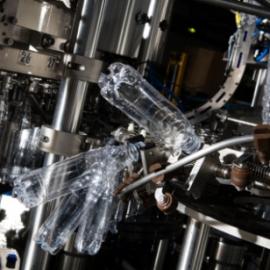
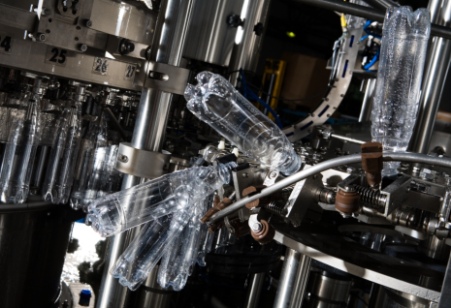
Plastica e gomma
Linee di encoder incrementali compatte e facili da montare, studiate per resistere ad un ampio spettro di temperature.
Paesi in cui siamo presenti
Part numbers
Utenti registrati
Ultime news
Alla radice di qualsiasi invenzione o innovazione tecnologica c'è sempre l'ingegno umano. Per questo siamo ben coscienti che sono le persone che compongono la nostra Azienda, con il loro know-how, le loro competenze ed esperienza a costituire il vero patrimonio di Eltra e a permetterle di crescere da oltre 30 anni.
"Think global, act local". Nel corso degli anni Eltra è diventata un'azienda con una presenza globale, con clienti in tutto il mondo e una rete di distribuzione che copre diversi continenti, mantenendo al tempo stesso la sua identità di industria Italiana, privilegiando sopra ogni cosa la qualità del prodotto e del servizio offerto al Cliente.
Per qualsiasi dubbio, richiesta di informazioni o chiarimenti su specifiche tecniche dei nostri encoder, potete contattare il nostro servizio di supporto al cliente via e-mail all'indirizzo:
support.eltra@broadcom.com
La nostra sede si trova a Sarego, loc. Monticello di Fara, a 26 Km dal capoluogo Vicenza e 40 Km da Verona.
Se ci raggiungete dall'autostrada l'uscita di Montebello dista a meno di 5 km, mentre il casello di Montecchio Maggiore si trova a circa 10 km di distanza.
Potete utilizzare queste coordinate sul navigatore:
Latitudine: 45.42167 - Longitudine: 11.39604.